一只灵巧的尺虫,牢牢地抓住圆形管,在向前弯曲时伸展和缩回。实际上,该挠性蠕虫是一种软机器人,其使用由天津大学开发并直接“印刷”的新型模块化挠性驱动方法。
3D打印机。柔性机器人由于其高度的灵活性和对人体的安全性,近年来受到了广泛的关注。
3D打印的优点在于,它无需进行后续处理即可产生复杂的形状和结构,并且可以一次形成。免打印装配结构是近年来3D打印技术在制造软机器人中的典型应用。
最近,天津大学的左思阳和刘建斌的研究小组提出了一种新的基于薄膜圆柱体的模块化柔性驱动方法,并通过改变布置和组合方法,合理安排,将其应用于人工肌肉和管道爬行机器人。根据具体应用的连接方案。
该方法基于一次性3D打印和成型的制造技术,节省了传统机电设备的加工和制造过程中的组装过程,大大降低了驱动模块的制造成本和周期,并具有很高的耗气量,高动态响应,高可靠性和强大的场景适应性等应用。结果在线发表在“ IEEE Robotics and Automation Letters”中。
在2021年1月上旬,“每个薄膜圆柱体就像是人体的一块小肌肉,或者是一个截面。爬行动物。
它只是由热塑性聚氨酯材料制成。”刘建斌解释说,使用这种新型的薄膜圆柱结构是团队的“奇思奇妙想法”。
如果将此结构比喻为基本的肌肉单元,则可以根据不同的应用需求来安排和连接这些单元的连接方法,就像将每个肌肉单元连接成一个完整的肌肉一样,然后将其应用于不同的场景,并且整个“肌肉”的制造过程采用一次形成的3D打印技术。基于这一想法,研究团队首先提出了一种新型的气动人造肌肉,该气动人造肌肉可用于驱动人机交互设备,例如柔性外骨骼。
气动使用压缩空气作为动力来驱动机械完成伸缩或旋转动作。与传统的气动人造肌肉相比,该设计的最大特点是它不会在厚度方向上产生膨胀,从而避免了人体的挤压。
此外,研究小组还提出了一种新型的气动管道爬行机器人,可以应用于工业管道设施的检查和实时监控。管道爬行机器人采用仿生蠕虫原理,通过巧妙地布置胶卷筒单元之间的连接,实现了机器人在管道内外壁上爬行。
灵活驱动方法的应用使机器人能够适应各种管径变化,并可以处理直管,弯头,垂直管,水平管以及各种角度的倾斜管应用场景。同时,机器人可以承受的重量是其自身重量的80倍以上。
由于它是通过气动方法驱动的,因此柔性机器人只能在较长的气管尾巴上工作。如果将传感器集成到设备中,则也可以去除这些气管尾巴,从而使机器人更加独立和精致。
这也是科学家今后将努力的方向。
-
 用于打印机系统JK
用于打印机系统JK
-
 WAN007030JD251SN03
WAN007030JD251SN03
-
人体红外线感应(PIR) 信号处理芯片
-
 WAN3216F245W36
WAN3216F245W36
-
 WAN4030D245M02
WAN4030D245M02
-
 WAN1003F039M03
WAN1003F039M03
-
 WAN5020D245W36
WAN5020D245W36
-
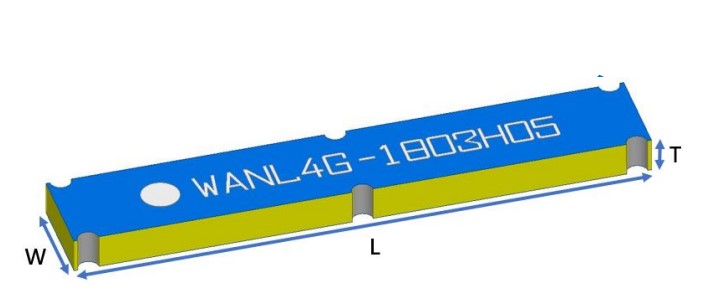 WAN1803DL4GH05
WAN1803DL4GH05
-
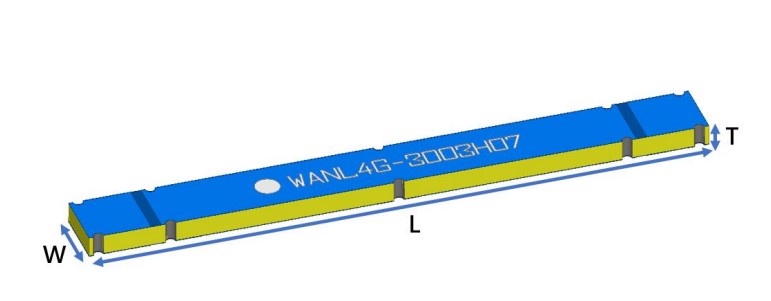 WAN3007DL4GH07
WAN3007DL4GH07
-
 光颉TR35 35W大功率精密无感电阻
光颉TR35 35W大功率精密无感电阻
-
 光颉TR30 30W大功率精密无感电阻
光颉TR30 30W大功率精密无感电阻
-
 光颉STR35 35W贴片大功率精密无感电阻
光颉STR35 35W贴片大功率精密无感电阻
-
 WAN007030JD271SN03
WAN007030JD271SN03
-
 WAN3216FD25D04
WAN3216FD25D04
-
 WAN3216E245H02
WAN3216E245H02
-
 WAN005320FD251SD01
WAN005320FD251SD01
-
 WAN3216F245L08
WAN3216F245L08
-
 WAN3216F245H08
WAN3216F245H08
-
WAN3216F245C04
-
WAN3216F245L18
-
 WAN3216F245HL6
WAN3216F245HL6
公司: 深圳市捷比信实业有限公司
电话: 0755-29796190
邮箱: tao@jepsun.com
产品经理: 陆经理
QQ: 2065372476
地址: 深圳市宝安区翻身路富源大厦1栋7楼

更多资讯
获取最新公司新闻和行业资料。
- 打印机系统JK优化方案 针对打印机系统JK的优化方案,我们可以从多个角度入手,以提升其运行效率和稳定性。首先,确保所有硬件设备都是最新版本,并且与当前操作系统兼容。这包括打印机驱动程序、固件更新等。定期检查并安装这些更新,可以有...
- 智能打印机系统与KVM切换器在自动化办公中的协同应用 智能打印机系统与KVM切换器在自动化办公中的协同应用随着企业数字化转型的不断深入,自动化办公系统对设备集成度和管理效率提出了更高要求。其中,打印机系统(JK)、KVM切换器以及自动化控制系统的融合应用,正成为提升...
- 现货SMC磁性开关D-90、D-A93 D-A73:高效可靠的自动化控制选择 现货供应的SMC磁性开关D-90、D-A93和D-A73型号是工业自动化领域中不可或缺的传感设备。这些开关主要用于检测气缸活塞的位置,通过内置的磁感应元件来实现非接触式的信号传输。它们在设计上具备小巧紧凑的特点,能够轻松安装...
- 基于KVM与打印机系统的自动化集成解决方案设计与实施 基于KVM与打印机系统的自动化集成解决方案设计与实施在现代企业信息化建设中,如何实现多设备间的高效协同已成为关键挑战。本文以打印机系统JK与KVM切换器为核心,探讨一套完整的自动化集成方案,涵盖架构设计、软硬件选...
- 天津可调设定点气体压差开关的应用与特点 天津可调设定点气体压差开关是一种用于监测和控制气体管道系统中压力差的精密设备。这种开关广泛应用于需要精确控制气体流量或检测过滤器堵塞情况的场合,比如在通风系统、空调系统以及工业过程控制等领域。其工作原...
- QA-/3 隔离开关熔断器组(上海人民):一种高效可靠的低压配电解决方案 QA-/3 隔离开关熔断器组是由上海人民电器厂生产的一种集开关与保护功能于一体的电器设备。这种装置广泛应用于低压配电系统中,作为线路及电气设备的不频繁接通和分断操作,并在过载或短路时通过熔断器进行保护。QA-/3 隔...
- 大毅大毅智能穿戴设备:以科技赋能健康生活,重塑人机交互体验 大毅大毅智能穿戴设备:从硬件到生态的全面升级作为国内领先的智能穿戴品牌,“大毅大毅智能穿戴设备”依托母公司大毅电子的技术积累,持续推动产品智能化、个性化与健康管理能力的深度融合。1. 全栈自研核心技术大毅...
- 大连接近开关——大连亚博工业设备有限公司的主打产品 大连亚博工业设备有限公司是一家专注于提供高品质工业自动化产品的公司。该公司特别擅长生产各类传感器和检测设备,其中大连接近开关是其主打产品之一。大连接近开关是一种非接触式的检测装置,广泛应用于各种工业自...
- 批发PB-3押扣开关:优质与可靠性的选择 关于实体批发的押扣开关PB-3,这款产品在工业应用中扮演着重要的角色。它是一种高品质、耐用的电气部件,被广泛应用于各种机械设备和控制系统之中。PB-3以其出色的性能和可靠性著称,在需要频繁操作或在恶劣环境中工作的...
- 3-Phase Gate Drivers 3相栅极驱动器技术详解 在电力电子系统中,3相栅极驱动器是实现高效电机控制的关键组件之一。3相栅极驱动器主要用于控制三相电机中的功率开关器件(如IGBT或MOSFET),通过精确地控制这些开关器件的导通与关断时间,可以有效提高电机运行效率、...
- KROM霍科德DG6U-3及DG50U-3压力开关:精密可靠的工业应用选择 KROM霍科德是一家在燃烧技术领域享有盛誉的公司,其提供的产品广泛应用于工业生产过程中。其中,DG6U-3和DG50U-3两款压力开关是该公司的代表性产品之一。这两种型号的压力开关设计精良,能够精确监测和控制气体或液体的压力...
- 怎么判断电风扇电容坏了还是电机坏了 过热引起的风扇不转。在风扇的装置里是有电机的,电机内会有个过热断路器,如果线圈绕组的地方发生短路,会让发热量短时间内增加,这样情况下电机都会“罢工”不动的了。先检查电机轴承是否卡死或太紧,正常的接入电...
- 天二取样电阻与天二天二配天四系统优化方案解析 天二取样电阻在电力系统中的关键作用天二取样电阻作为电力监控与保护系统中的核心元件,主要用于实时采集电流信号,为后续的电压、功率等参数计算提供精确数据支持。其精度直接影响整个系统的稳定性与安全性。1. 取样...
- 基于天二取样电阻的天二天二配天四系统故障排查与优化实践 天二取样电阻异常引发的系统级故障案例分析某工业园区配电系统曾因天二取样电阻老化导致数据偏差,进而引发‘天二天二配天四’系统误报跳闸事件。经排查,根源在于取样电阻阻值漂移超过±5%,造成电流计算误差。1. 常见...
- 侧面发光三色LED灯珠:打造沉浸式视觉体验的关键元件 侧面发光三色LED灯珠的技术突破与创新应用侧面发光三色LED灯珠通过特殊封装设计,将光线从侧向均匀发射,特别适用于需要边缘照明或轮廓勾勒的视觉设计场景,是现代产品美学的重要组成部分。1. 均匀侧向发光,视觉效果出...
- 触控屏幕控制器原理详解:从信号采集到人机交互的全过程 触控屏幕控制器原理详解触控屏幕控制器是实现触摸交互的核心硬件组件,广泛应用于智能手机、平板电脑、工业控制面板及智能家居设备中。其核心功能是实时检测用户手指或触控笔的位置,并将这些信息转化为数字信号,供...
- Square D空气开关:卓越性能与可靠质量的代表 施耐德电气旗下的Square D(美商实块)是全球知名的电气设备品牌之一,其生产的空气开关被广泛应用于工业、商业以及住宅等多个领域。Square D空气开关以其卓越的性能、可靠的质量和先进的技术赢得了用户的高度认可。这些空...
- Chip SMD-3.2X2.4mm LED灯珠:大功率高亮度解决方案 Chip SMD-3.2X2.4mm LED灯珠深度评测与选型指南在需要更高亮度输出和更优散热性能的应用场景中,Chip SMD-3.2X2.4mm LED灯珠成为理想之选。相较于小型号产品,该规格在功率承载能力、光效输出和耐用性方面均有显著提升,广泛用于户外...
- 磁性感应接近开关SMC D-C73:高效稳定的自动化控制选择 磁性感应接近开关SMC D-C73是一种高效、非接触式的检测设备,广泛应用于自动化控制领域。这种开关能够检测到特定类型的磁场变化,并据此触发开关动作,无需物理接触即可完成信号的传输与处理,因此在提高设备运行效率的...
- 聚鼎1.0SMBJ瞬态抑制二极管:小尺寸大能量,打造紧凑型防护方案 聚鼎1.0SMBJ瞬态抑制二极管:微型化时代的高效过压保护利器随着电子产品向小型化、轻量化方向发展,对保护器件的体积与性能提出了更高要求。聚鼎推出的1.0SMBJ系列瞬态抑制二极管(TVS),在保持紧凑外形的同时,实现了强大...